09. Resampling Wheel
Resampling Wheel
Resampling Wheel
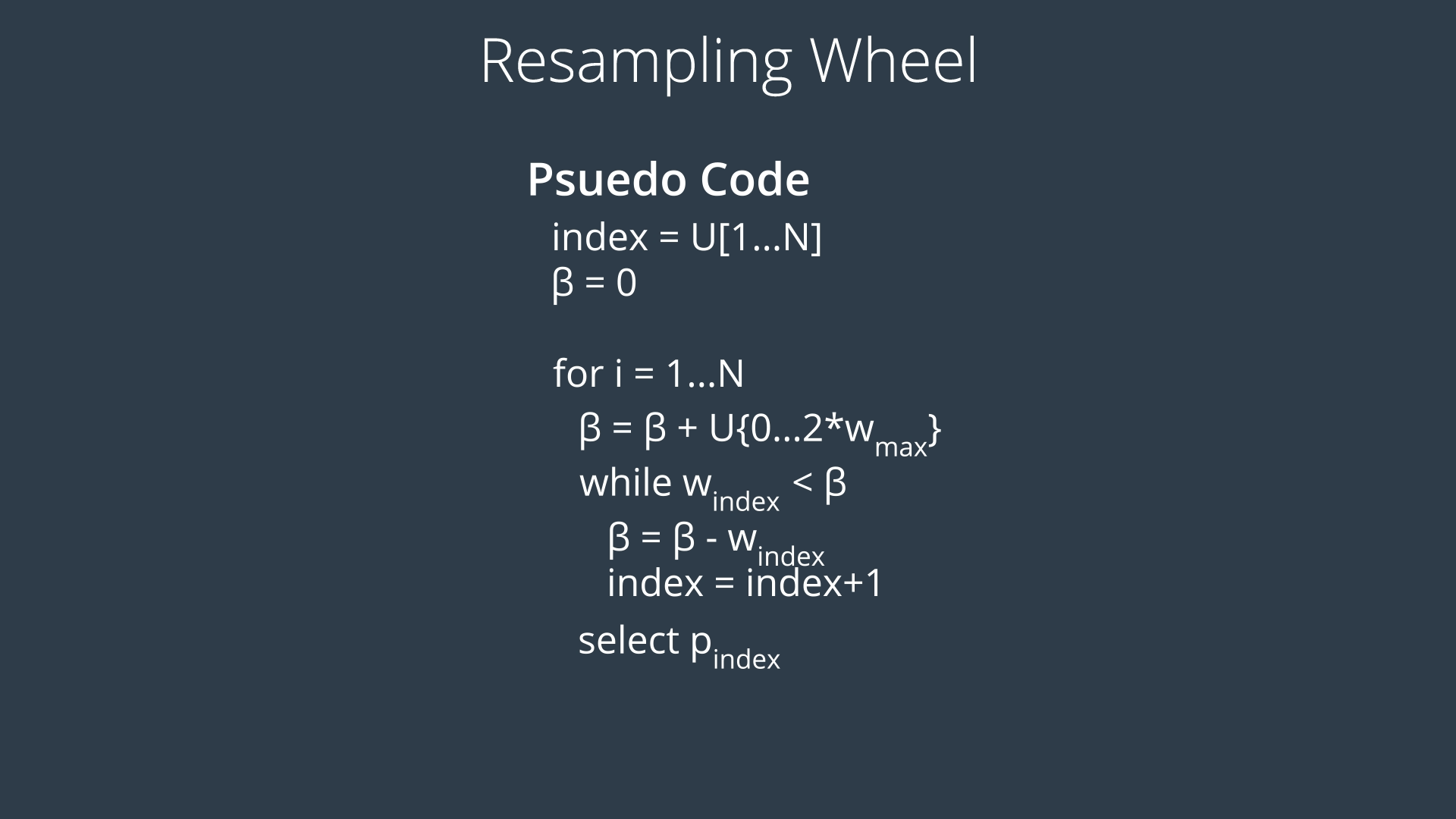
Now that you’ve learned the resampling wheel pseudo code, you'll try to implement it in C++. In this quiz, resample the particles with a sample probability proportional to the importance weight
Start Quiz: